PID Control with Arduino
NOTE 1: before using PYDAQ with an Arduino board, make sure the board is recognized by your operating system as a USB/serial device. If the COM port does not appear in PYDAQ, install the required USB driver for your board, such as the Arduino IDE drivers or the CH340/CH341 driver for compatible boards, and reconnect the device.
NOTE 2: to acquire/send data with an Arduino board, the unified firmware provided here (located at arduino_code) must be uploaded to the Arduino first. This firmware handles communication via serial CSV. To maintain theoretical rigor in classical control theory, the PID Control module operates strictly as a Single-Input Single-Output (SISO) system. Therefore, you must select exactly one analog input channel (e.g., A0) and one digital PWM output channel (e.g., D0).
NOTE 3: PYDAQ is programmed to use 10 bits as ADC resolution and 0V to 5V as the input range. To change this, the user can alter the following variables:
Controlling using Graphical User Interface (GUI)
Using the GUI to perform PID control is very straightforward and requires only two lines of code:
After running the command, the GUI will appear. Navigate to the "PID Control" screen, where you can define the parameters and start the control session.
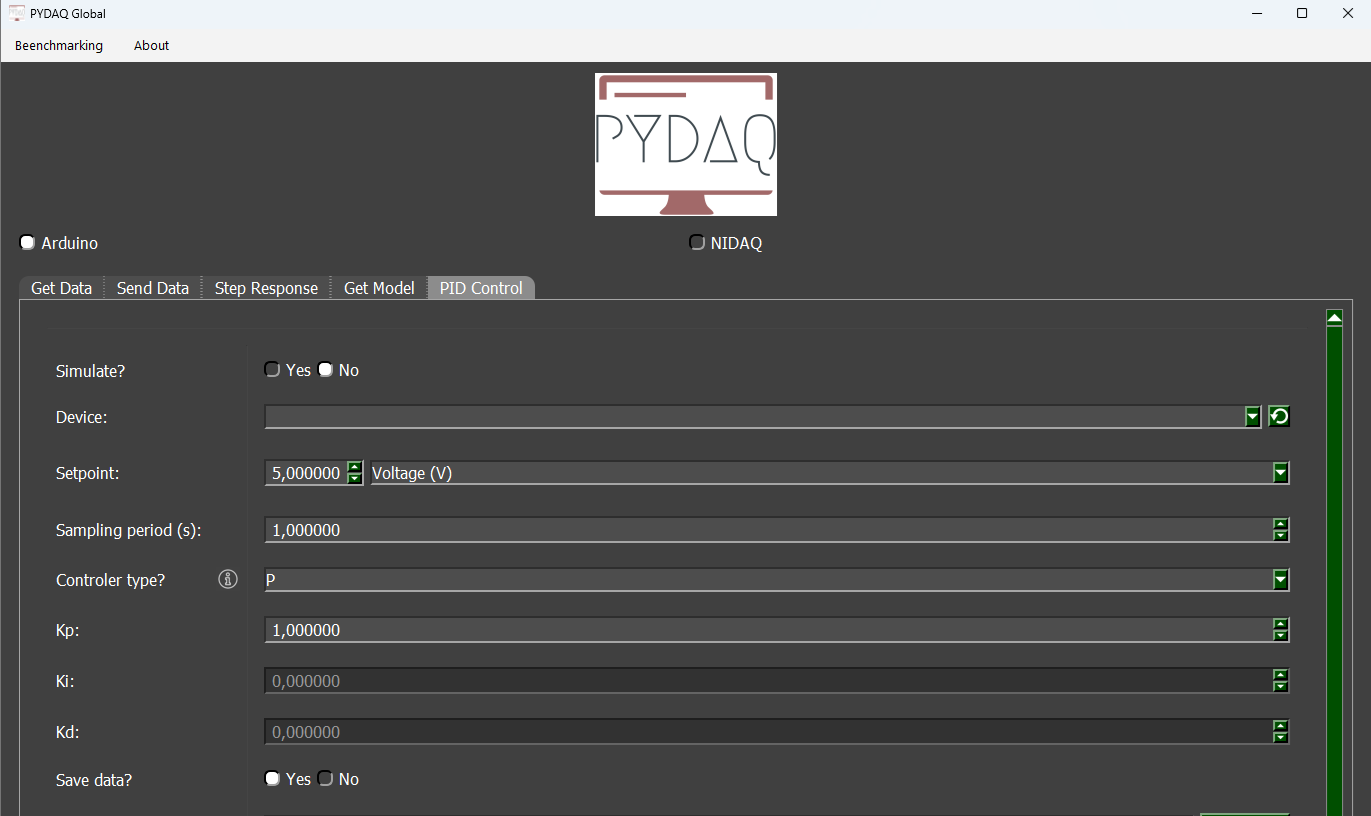
Parameters
-
Simulate: If this option is selected, you can enter a mathematical equation to simulate a system and apply PID control to it.
-
Device: Select the Arduino board connected to your system.
-
Setpoint: Define the desired reference value for the system.
-
Unit (optional): Define the unit of measurement for the setpoint (e.g., °C, rpm, volts).
-
Equation (optional): Define a mathematical transformation for the measured input, if needed.
-
Sampling Period (s): Time interval (in seconds) between each data sample.
-
Controller Type: Choose among P, PI, PD, or PID controllers and configure their respective tuning parameters.
-
Save Data: Choose whether to save the recorded data during the session.
-
Path: Define where the data files will be saved.
Simulated System
If you enable the Simulate option, the software will not require a physical device. Instead, you can input the transfer function or system equation, and PYDAQ will simulate its response using the defined controller parameters.
This is useful for testing your control strategy before applying it to a real system.
Real-Time Control
After adjusting the parameters and starting the control, a new window will open to display the real-time control process. Within this window, you can also modify the PID parameters (kp, ki, kd) and the setpoint during execution.
A disturbance input can also be simulated during real-time control. It acts as a negative signal added after the control signal, as illustrated in the figure below.
Example GIF
PID Control with Arduino (GUI via code)
It is possible to access the PID Control GUI directly with a few lines of code. This allows you to hardcode your hardware and controller settings for faster testing and deployment, bypassing the initial setup screens.
Example
The following code demonstrates how to connect to an Arduino board, set the analog/digital channels, and launch the control interface with predefined PID parameters.
import sys
from PySide6.QtWidgets import QApplication
from pydaq.guis.pid_control_window_dialog import PID_Control_Window_Dialog
app = QApplication(sys.argv)
plot_window = PID_Control_Window_Dialog()
# 1. Hardware Configuration
plot_window.check_board(
board="arduino",
hardware_id="COM7",
ao=['D0'], # Single-Input Single-Output (SISO) configuration
ai=['A0'],
terminal=None,
simulate=False
)
# 2. Controller & Logging Parameters
plot_window.set_parameters(
kp=1.0, ki=0.2, kd=0.05, index=3,
numerator=None, denominator=None,
setpoint=2.0, unit="Voltage (V)",
equationvu="", equationuv="",
period=0.1, path=None, save=True
)
# 3. Launch the Application
plot_window.exec()
Understanding the Methods
check_board()
This method injects the hardware configuration into the PyDAQ window.
* board: Type of board ('arduino' or 'nidaq').
* hardware_id: The communication port (e.g., 'COM7' on Windows, '/dev/ttyUSB0' on Linux).
* ai / ao: Lists containing exactly one element defining the Analog Input (Sensor) and Digital/PWM Output (Actuator). Example: ai=['A0'] and ao=['D0'].
* simulate: Set to True to run a mathematical simulation without hardware.
set_parameters()
This method sets the initial tuning for your controller and defines how data is saved. Pass None or "" to fields you don't need to override.
* kp, ki, kd: Proportional, Integral, and Derivative gains.
* index: Controller Type (0 = P, 1 = PI, 2 = PD, 3 = PID).
* setpoint: The target value the controller will try to reach.
* period: Sample period in seconds (e.g., 0.1 equals a 10Hz sampling rate).
* unit: The Y-axis label for the plot.
* path / save: Destination folder for .dat files. If path is None, it defaults to the user's Desktop. Set save=True to automatically save data when the window is closed.
exec()
Opens the control interface and starts the Qt event loop. This blocks the script until the window is closed by the user.
Summary of Execution
check_board: Selects Arduino as the control device and configures channels.set_parameters: Sets gains, setpoint, sampling period, and save path.exec(): Opens the control interface.